

Por favor, use este identificador para citar o enlazar este ítem:
http://hdl.handle.net/10637/10484PGD Variational vademecum for robot motion planning : a dynamic obstacle case
| Título : | PGD Variational vademecum for robot motion planning : a dynamic obstacle case |
| Autor : | Montés Sánchez, Nicolás Hilario Pérez, Lucía Nadal Soriano, Enrique Mora Aguilar, Marta Covadonga Falcó Montesinos, Antonio Chinesta, Francisco Duval, Jean Louis |
| Materias: | Robótica - Modelos matemáticos.; Descomposición (Matemáticas); Robotics - Mathematical models.; Métodos de simulación.; Simulation methods.; Decomposition (Mathematics) |
| Editorial : | ScienceOpen |
| Citación : | Montés, N., Hilario, L., Nadal, E., Mora, MC., Falcó, A., Chinesta, F. et al. (2018). PGD Variational vademecum for robot motion planning : a dynamic obstacle case. ScienceOpen Posters. DOI: https://doi.org/10.14293/P2199-8442.1.SOP-MATH.OKPFPG.v1 |
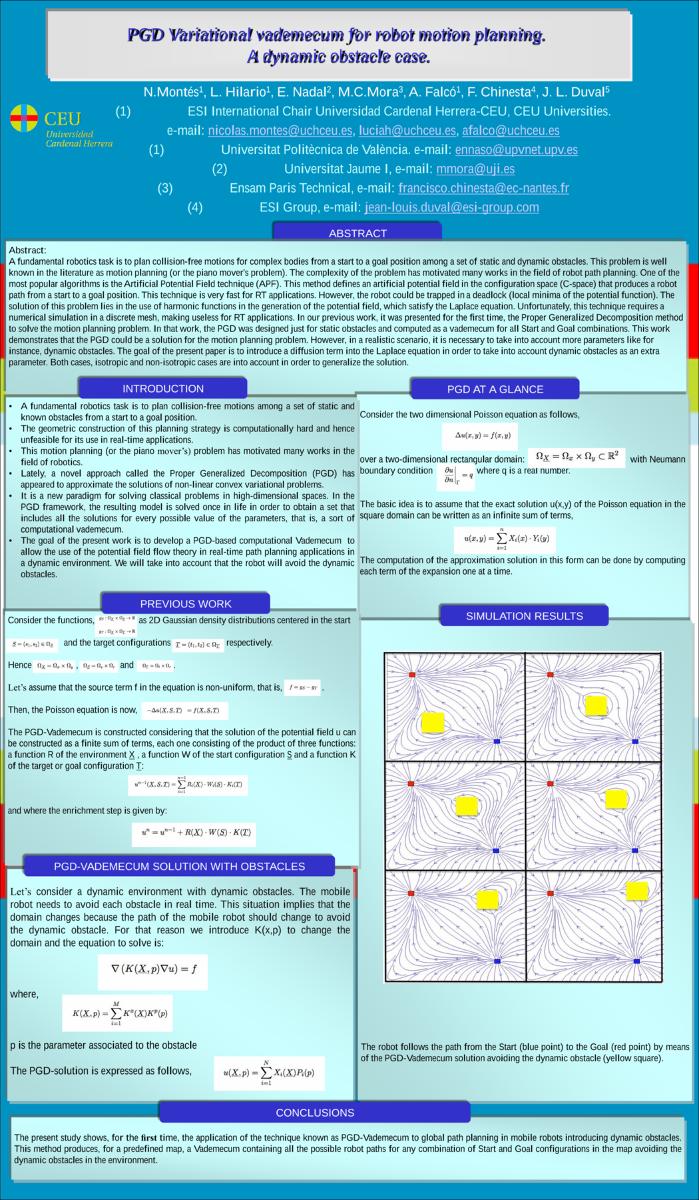
| Resumen : | A fundamental robotics task is to plan collision-free motions for complex bodies from a start to a goal position among a set of static and dynamic obstacles. This problem is well known in the literature as motion planning (or the piano mover's problem). The complexity of the problem has motivated many works in the field of robot path planning. One of the most popular algorithms is the Artificial Potential Field technique (APF). This method defines an artificial potential field in the configuration space (C-space) that produces a robot path from a start to a goal position. This technique is very fast for RT applications. However, the robot could be trapped in a deadlock (local minima of the potential function). The solution of this problem lies in the use of harmonic functions in the generation of the potential field, which satisfy the Laplace equation. Unfortunately, this technique requires a numerical simulation in a discrete mesh, making useless for RT applications. In our previous work, it was presented for the first time, the Proper Generalized Decomposition method to solve the motion planning problem. In that work, the PGD was designed just for static obstacles and computed as a vademecum for all Start and Goal combinations. This work demonstrates that the PGD could be a solution for the motion planning problem. However, in a realistic scenario, it is necessary to take into account more parameters like for instance, dynamic obstacles. The goal of the present paper is to introduce a diffusion term into the Laplace equation in order to take into account dynamic obstacles as an extra parameter. Both cases, isotropic and non-isotropic cases are into account in order to generalize the solution. |
| Descripción : | Este póster (comunicación) se encuentra disponible en la siguiente URL: https://www.scienceopen.com/document?vid=b193419e-7f0e-43db-a871-368a05ec6131 |
| URI : | http://hdl.handle.net/10637/10484 |
| Derechos: | http://creativecommons.org/licenses/by/4.0/deed.es |
| Fecha de publicación : | 27-abr-2018 |
| Centro : | Universidad Cardenal Herrera-CEU |
| Aparece en las colecciones: | Dpto. Matemáticas, Física y Ciencias Tecnológicas |
Los ítems de DSpace están protegidos por copyright, con todos los derechos reservados, a menos que se indique lo contrario.